2. Теория
2.1 Мозг
Мозгом для будущей системы решено было взять Arduino.
Arduino – это инструмент для проектирования электронных устройств (электронный конструктор) более плотно взаимодействующих с окружающей физической средой, чем стандартные персональные компьютеры, которые фактически не выходят за рамки виртуальности. Это платформа, предназначенная для «physical computing» с открытым программным кодом, построенная на простой печатной плате с современной средой для написания программного обеспечения.
Почему Arduino?
Существует множество микроконтроллеров и платформ для осуществления «physical computing». Parallax Basic Stamp, Netmedia's BX-24, Phidgets, MIT's Handyboard и многие другие предлагают схожую функциональность. Все эти устройства объединяют разрозненную информацию о программировании и заключают ее в простую в использовании сборку. Arduino, в свою очередь, тоже упрощает процесс работы с микроконтроллерами, однако имеет ряд преимуществ перед другими устройствами для преподавателей, студентов и любителей:
Низкая стоимость – платы Arduino относительно дешевы по сравнению с другими платформами. Самая недорогая версия модуля Arduino может быть собрана в ручную, а некоторые даже готовые модули стоят меньше 50 долларов.
Кросс-платформенность – программное обеспечение Arduino работает под ОС Windows, Macintosh OSX и Linux. Большинство микроконтроллеров ограничивается ОС Windows.
Простая и понятная среда программирования – среда Arduino подходит как для начинающих пользователей, так и для опытных. Arduino основана на среде программирования Processing, что очень удобно для преподавателей , так как студенты работающие с данной средой будут знакомы и с Arduino.
Программное обеспечение с возможностью расширения и открытым исходным текстом – ПО Arduino выпускается как инструмент, который может быть дополнен опытными пользователями. Язык может дополняться библиотеками C++. Пользователи, желающие понять технические нюансы, имеют возможность перейти на язык AVR C на котором основан C++. Соответственно, имеется возможность добавить код из среды AVR-C в программу Arduino.
(c) http://arduino.ru
2.2 Сервопривод
Изначально стоял выбор между шаговым двигателем и сервой. Но, как по мне, для данного механизма серва будет более правильным выбором из-за его огромного крутящего момента (благодаря редуктору) + отсутствия надобности в motor shield (отдельная плата, которая управляет мотором).
Под сервоприводом чаще всего понимают механизм с электромотором, который можно попросить повернуться в заданный угол и удерживать это положение. Однако, это не совсем полное определение.
Если сказать полнее, сервопривод — это привод с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами движения. Сервоприводом является любой тип механического привода, имеющий в составе датчик (положения, скорости, усилия и т.п.) и блок управления приводом, автоматически поддерживающий необходимые параметры на датчике и устройстве согласно заданному внешнему значению.
Иными словами:
- Сервопривод получает на вход значение управляющего параметра. Например, угол поворота
- Блок управления сравнивает это значение со значением на своём датчике
- На основе результата сравнения привод производит некоторое действие, например: поворот, ускорение или замедление так, чтобы значение с внутреннего датчика стало как можно ближе к значению внешнего управляющего параметра
Типичный хобби-сервопривод изображён ниже.

Каким же образом устроены сервоприводы?
Устройство сервопривода
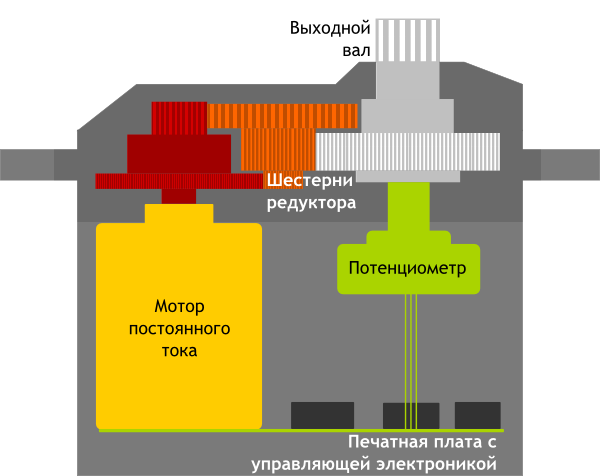
Сервоприводы имеют несколько составных частей.
Привод — электромотор с редуктором. Чтобы преобразовать электричество в механический поворот, необходим электромотор. Однако зачастую скорость вращения мотора бывает слишком большой для практического использования. Для понижения скорости используется редуктор: механизм из шестерней, передающий и преобразующий крутящий момент.
Включая и выключая электромотор, можно вращать выходной вал — конечную шестерню сервопривода, к которой можно прикрепить нечто, чем мы хотим управлять. Однако, для того чтобы положение контролировалось устройством, необходим датчик обратной связи — энкодер, который будет преобразовывать угол поворота обратно в электрический сигнал. Для этого часто используется потенциометр. При повороте бегунка потенциометра происходит изменение его сопротивления, пропорциональное углу поворота. Таким образом, с его помощью можно установить текущее положение механизма.
Кроме электромотора, редуктора и потенциометра в сервоприводе имеется электронная начинка, которая отвечает за приём внешнего параметра, считывание значений с потенциометра, их сравнение и включение/выключение мотора. Она-то и отвечает за поддержание отрицательной обратной связи.
К сервоприводу тянется три провода. Два из них отвечают за питание мотора, третий доставляет управляющий сигнал, который используется для выставления положения устройства.
2.1 Мозг
Мозгом для будущей системы решено было взять Arduino.
Arduino – это инструмент для проектирования электронных устройств (электронный конструктор) более плотно взаимодействующих с окружающей физической средой, чем стандартные персональные компьютеры, которые фактически не выходят за рамки виртуальности. Это платформа, предназначенная для «physical computing» с открытым программным кодом, построенная на простой печатной плате с современной средой для написания программного обеспечения.
Почему Arduino?
Существует множество микроконтроллеров и платформ для осуществления «physical computing». Parallax Basic Stamp, Netmedia's BX-24, Phidgets, MIT's Handyboard и многие другие предлагают схожую функциональность. Все эти устройства объединяют разрозненную информацию о программировании и заключают ее в простую в использовании сборку. Arduino, в свою очередь, тоже упрощает процесс работы с микроконтроллерами, однако имеет ряд преимуществ перед другими устройствами для преподавателей, студентов и любителей:
Низкая стоимость – платы Arduino относительно дешевы по сравнению с другими платформами. Самая недорогая версия модуля Arduino может быть собрана в ручную, а некоторые даже готовые модули стоят меньше 50 долларов.
Кросс-платформенность – программное обеспечение Arduino работает под ОС Windows, Macintosh OSX и Linux. Большинство микроконтроллеров ограничивается ОС Windows.
Простая и понятная среда программирования – среда Arduino подходит как для начинающих пользователей, так и для опытных. Arduino основана на среде программирования Processing, что очень удобно для преподавателей , так как студенты работающие с данной средой будут знакомы и с Arduino.
Программное обеспечение с возможностью расширения и открытым исходным текстом – ПО Arduino выпускается как инструмент, который может быть дополнен опытными пользователями. Язык может дополняться библиотеками C++. Пользователи, желающие понять технические нюансы, имеют возможность перейти на язык AVR C на котором основан C++. Соответственно, имеется возможность добавить код из среды AVR-C в программу Arduino.
(c) http://arduino.ru
Изначально стоял выбор между шаговым двигателем и сервой. Но, как по мне, для данного механизма серва будет более правильным выбором из-за его огромного крутящего момента (благодаря редуктору) + отсутствия надобности в motor shield (отдельная плата, которая управляет мотором).
Под сервоприводом чаще всего понимают механизм с электромотором, который можно попросить повернуться в заданный угол и удерживать это положение. Однако, это не совсем полное определение.
Если сказать полнее, сервопривод — это привод с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами движения. Сервоприводом является любой тип механического привода, имеющий в составе датчик (положения, скорости, усилия и т.п.) и блок управления приводом, автоматически поддерживающий необходимые параметры на датчике и устройстве согласно заданному внешнему значению.
Иными словами:
- Сервопривод получает на вход значение управляющего параметра. Например, угол поворота
- Блок управления сравнивает это значение со значением на своём датчике
- На основе результата сравнения привод производит некоторое действие, например: поворот, ускорение или замедление так, чтобы значение с внутреннего датчика стало как можно ближе к значению внешнего управляющего параметра
Типичный хобби-сервопривод изображён ниже.
Каким же образом устроены сервоприводы?
Устройство сервопривода
Сервоприводы имеют несколько составных частей.
Привод — электромотор с редуктором. Чтобы преобразовать электричество в механический поворот, необходим электромотор. Однако зачастую скорость вращения мотора бывает слишком большой для практического использования. Для понижения скорости используется редуктор: механизм из шестерней, передающий и преобразующий крутящий момент.
Включая и выключая электромотор, можно вращать выходной вал — конечную шестерню сервопривода, к которой можно прикрепить нечто, чем мы хотим управлять. Однако, для того чтобы положение контролировалось устройством, необходим датчик обратной связи — энкодер, который будет преобразовывать угол поворота обратно в электрический сигнал. Для этого часто используется потенциометр. При повороте бегунка потенциометра происходит изменение его сопротивления, пропорциональное углу поворота. Таким образом, с его помощью можно установить текущее положение механизма.
Кроме электромотора, редуктора и потенциометра в сервоприводе имеется электронная начинка, которая отвечает за приём внешнего параметра, считывание значений с потенциометра, их сравнение и включение/выключение мотора. Она-то и отвечает за поддержание отрицательной обратной связи.
К сервоприводу тянется три провода. Два из них отвечают за питание мотора, третий доставляет управляющий сигнал, который используется для выставления положения устройства.
Комментариев нет:
Отправить комментарий